Huvudinnehåll
Utforska ett ämne i kunskapsbanken
Meteorologi
Faktapaket: Meteorologiska modeller
Kaos - centralt för väderprognoser
En numerisk väderprognosmodell uppför sig kaotiskt eftersom den innehåller icke-linjära termer. Det innebär att en mycket liten ändring av exempelvis temperaturen i utgångsläget ger efter en viss tid prognoser som skiljer sig lika mycket åt som två godtyckliga väderlägen.
Många fenomen i verkligheten uppför sig linjärt. Om man skjuter med ett gevär och kulan kommer för högt, så sänker man geväret inför nästa skott. Genom att ändra positionen kan man med allt mindre justeringar träffa rätt. Så uppför sig en linjär fysikalisk process.
Icke-linjära processer
Vi kan tänka oss att vi vill studera hur antalet fjällämlar varierar från år till år. Det är rimligt att anta att antalet lämlar nästa år är proportionellt mot antalet lämlar i år, så länge det finns samma levnadsförutsättningar, som exempelvis mat. Dock om antalet lämlar blir för stort så kommer en minskning att ske, eftersom maten blir en begränsning.
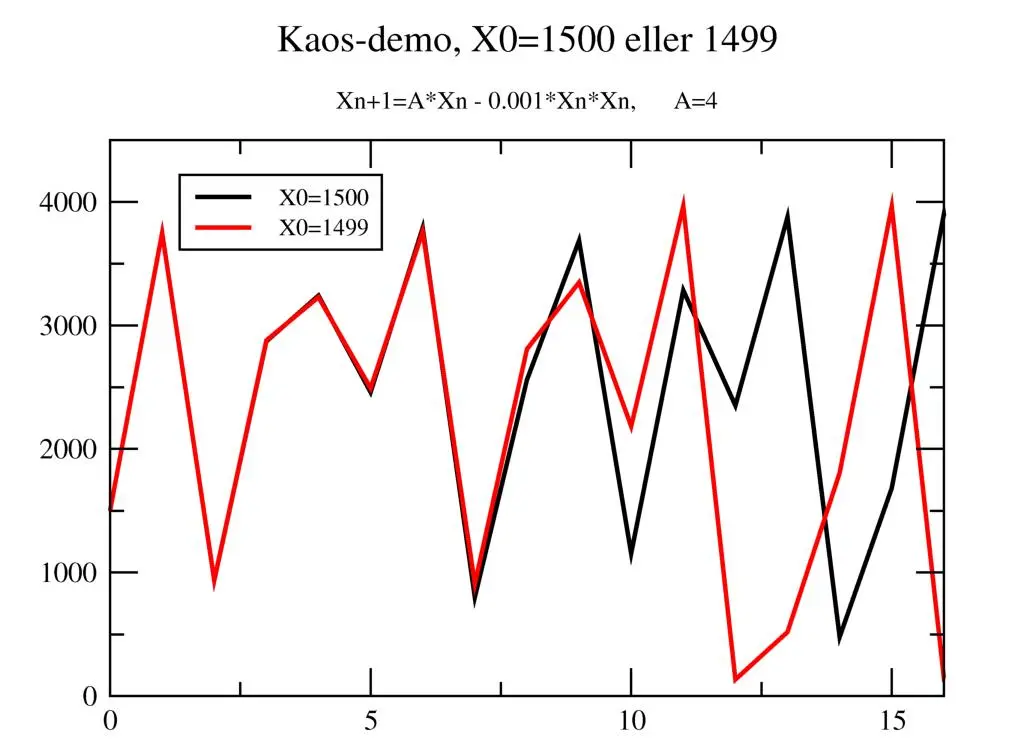
Dessa processer kan formuleras i en enkel matematisk modell, som har några intressanta egenskaper. Antalet lämlar ett visst år Xn+1 kan uttryckas som en funktion av antalet föregående år Xn som: Xn+1 = A·Xn -0.001·Xn·Xn , X0=1500, A=4 Det är den andra termen (-0.001·Xn·Xn) som är intressant för den är icke-linjär, eftersom den innehåller produkten av Xn med sig själv.
Antag nu att denna modell gäller, och vi beräknar denna talföljd. Vi gör sedan om samma process, men använder ett något annorlunda startvärde nämligen X0=1499.
 Förstora bilden
Förstora bildenDiagrammet visar hur en mycket liten ändring av startvärdet i en icke-linjär process, efter en viss tid ger ett helt annorlunda utfall än utan denna ändring. Detta kallas en kaotisk process.
I figuren är antalet lämlar de först åren mycket lika i de två experimenten, men efter ca 6 år börjar det skilja sig och senare finns det inga likheter alls mellan kurvorna. Detta beror på den icke-linjära termen och kallas kaos. Med andra ord kan en mycket liten ändring av startvärdet i en icke-linjär process ge, efter en viss tid, ett helt annorlunda utfall än utan denna ändring. Detta kallas en kaotisk process, och den har vissa egenskaper, till exempel håller sig lösningen hela tiden inom ett begränsat område (det går inte till oändligheten).
Vad har kaos med vädret att göra?
En numerisk väderprognosmodell innehåller icke-linjära termer. Ett enkelt exempel är att det kan bli kallare i en punkt om det blåser från ett visst håll där det befinner sig kallare luft, och ju större temperaturskillnad det är och vid kraftigare vind blir punkten kallare. Detta är icke-linjärt, eftersom processen innehåller skillnader i vindhastighet och temperatur, som båda är variabler i systemet. Detta innebär att prognosmodellen uppför sig kaotiskt.
Om man gör ett liknande experiment som den enkla modellen ovan, med en prognosmodell, som har miljontals variabler (temperaturer, vindar, fuktighet etc. på många platser och i många nivåer), och till exempel ändrar temperaturen i en punkt i utgångsläget med en halv grad, och kör om prognosen, så kommer vädret efter en viss tid att skilja sig åt mellan prognoserna lika mycket som två godtyckliga väderlägen.
Den tid som prognoserna är tillräckligt nära varandra anger hur länge man har något värde i informationen och kallas prediktabiliteten för systemet. Man har beräknat denna tidsgräns till ca två veckor. Detta är alltså den teoretiska gränsen för en traditionell väderprognos.
Långtidsprognoser
Längre prognoser är av mera klimatologisk karaktär. Om man fortsätter att köra modellen under mycket lång tid (dvs. bortom prediktabilitetsgränsen), kommer varje dag i körningen att se realistisk ut med rimliga väderutvecklingar, men det enda informationsvärde som finns är modellens klimatologiska egenskaper.
Det är detta som är idén bakom en klimatsimulering. Icke-linjäriteten hos en prognosmodell gör att lösningar kan skilja sig från varandra ganska mycket även på en kortare tidsskala om man gör flera olika körningar, med något olika initialtillstånd, eller något olika modellformuleringar. Genom ett noggrant val av dessa körningar, kan man säga något om sannolikhetsfördelningen av prognoserna. Detta kallas ensembleprognoser.
För den intresserade rekommenderas boken Kaos av James Gleick.
Mer i detta faktapaket
- Meteorologi
Meteorologiska modeller
Prognosmodeller och kraftfulla datorer är grunden för dagens prognoser. Det finns många olika modeller som används för olika typer av prognoser.
- Meteorologiska modeller
Dataassimilering
Med hjälp av dataassimilering skapas startvärden (väderläget) för en numerisk prognosmodell. Det är en av de viktigaste komponenterna i ett prognos...
- Meteorologiska modeller
De första stegen mot numeriska prognoser
År 1956 gjordes de första datorbaserade prognoserna vid SMHI, men vägen dit var lång.
- Meteorologiska modeller
Ensembleprognoser
På grund av osäkerheten i indata och att atmosfären är icke-linjär går det inte att göra exakta förutsägelser av vädret. Detta leder till att se vä...
- Meteorologiska modeller
Hur är en numerisk väderprognosmodell uppbyggd?
Väderprognosproblemet är ett fysikaliskt problem, som kan formuleras matematiskt, som ett system av differentialekvationer. Här diskuteras själva p...
- Meteorologiska modeller
Kalmanfiltrering av numeriska prognoser
Kalmanfiltrering är en matematisk metod att optimalt bestämma statistiska parametrar ur ett begränsat antal observationer. Adaptiva filter är kraft...
- Meteorologiska modeller
Korta nederbördsprognoser - KNEP
SMHI har utvecklat en metod för att göra korta nederbördsprognoser med hjälp av senaste radarinformationen.
- Meteorologiska modeller
Markens roll i en numerisk prognosmodell
Inte bara atmosfären utan även markytan och haven måste modelleras i en väderprognosmodell.



Faktapaket meteorologi
Alla faktapaket inom meteorologi
Vi har satt ihop artiklar utifrån kategorier. Allt för att du ska få ett samlat innehåll.