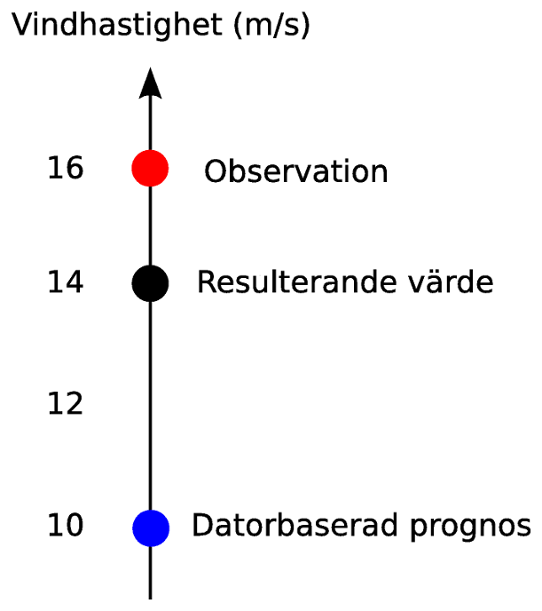
Dataassimilering inom meteorologi handlar om att använda olika typer av väderobservationer för att finna ut hur vädret är vid en viss tidpunkt. Vad man i allmänhet menar med väder karakteriseras av en rad olika atmosfäriska egenskaper, såsom till exempel lufttemperatur, vind och molnighet. Det finns en stor mängd tillgängliga väderobservationer. Somliga observationer är markbaserade medan andra görs från rymden med satellitbaserade mätinstrument. Ett problem är att observationerna är geografiskt ojämnt fördelade och i vissa områden saknas observationer av alla eller vissa egenskaper som karaktäriserar vädret. För att lösa detta problem kombineras väderinformationen från observationerna med informationen från en datorbaserad väderprognos, gällande vid observationstillfället. På så sätt får man, genom prognosen, fullständig information om vädret även i områden där observationer saknas. I områden där man har väderobservationer finner man ut hur vädret är genom en kombination av det observerade atmosfäriska egenskaperna och de prognostiserade egenskaperna. Detta eftersom såväl väderobservationer som väderprognoser kan vara behäftade med fel. Att beräkna hur informationen ska kombineras är en viktig del av meteorologisk dataassimilering.
Att få en fullständig bild av hur vädret är vid en viss tidpunkt är intressant i sig men den genom dataassimilering erhållna vädersituationen används också som startillstånd för den datorbaserade väderprognosen. Prognoskvaliten är ytterst beroende av ett korrekt startfält eftersom atmosfären är beskaffad så att fel i starttillståndet snabbt kan växa till sig och även resultera i stora oönskade fel i väderprognoserna.
Det finns en rad olika metoder för atmosfärisk dataassimilering. På SMHI använder vi oss av variationell dataassimilering. Denna är formulerad som optimeringsproblem där vi definierar en målfunktion som minimeras. Målfunktionen består av en del som beror på tillförlitligheten hos observationerna och en del som beror på tillförlitligheten hos den datorbaserade väderprognosen gällande vid observationstillfället. Tillförlitligeheten är baserad på uppskattade typiska fel för olika väderobservationstyper och även för den datorbaserade väderprognosen. Minimeringen av målfunktionen sker numeriskt genom ett iterativt förfarande och det atmosfäriska tillstånd som minimerar målfunktionen är det som bäst överensstämmer med såväl observationer som datorbaserad prognos.